Internet to potÄga ÂŤ ObserwujÄ, myĹlÄ, piszÄ â serwis Goldenrose
Ladies and gentleman, wersja 2.1 już powstaje!Żeby z pustymi rękami nie pokazywać się w Warszawie, składam już zespół napędowy pojedynczego koła. Ze wstępnych szacunków wyszło mi, że całe podwozie będzie kosztowało 1,5-2 tys. złotych, w zależności od zastosowanych materiałów i jakości wiertarek.
Jeśli ktoś zna sponsora, który wyłoży 2 patole na tego robota, to kontakt mile widziany
Poniżej zdjęcia w klimacie noir
Marcusos, nie mogę załadować fotek, dostaję następujący komunikat:
Błąd wysyłania załącznika (nie można skopiować do określonego katalogu: ./files/wiert3_205.jpg, skontaktuj się z administratorem forum.
Wspomne o tym w wywiadzie może ktoś się znajdzie?
Nie wzoruj się tym razem na poprzednich wersjach, jak dla mnie były nieudane. Takie coś (2.0) nie przejedzie nawet 3m po plaży, bo się koła zamielą w piachu. Albo gąsienice, albo koła odpowiednio sporych rozmiarów, albo inny system poruszania się.
Spróbuję przemyśleć kilka wariantów systemów kroczących które plączą mi się w głowie. Dwunożny system od razu można wykluczyć - za duża niepewność i brak systemu podnoszenia się po upadku bedzie problemem. Pozostają systemy 4, 6 i więcej nożne. 4-nożny ze zmianą środka ciężkości - cyklicznie przestawianie środka masy równoważące brak podparcia przestawianej nogi. Tu najefektywniejsze jest sprężynowe balansowanie ciałem z jednoczesnym przestawianiem nóg (np. jaszczurka), ale na dzień dzisiejszy b.trudne do zrealizowania. Dosyć łatwe jest umieszczenie masywnego półkola na osi silnika centralnego który przesuwa odpowiednio masę wyrównującą brak jednej nogi. Systemy 6-nożne są również stabilne bo podczas przestawiania pary nóg zawsze mamy podparcie w pozostałych 2 parach. Największy problem w takich rozwiązaniach to system nóg.
To nie była kwestia "udania", tylko finansowania. Poza tym 2.0 nie był projektowany do jazdy po plaży, tylko po posadzce. Spełnił oczekiwania, więc był udany. Wersja 2.1 jest projektowana do jazdy w terenie, także po plaży (chociaż jeszcze nie wiem, czy będzie możliwość wykonania odpowiednich kół). Narysowałem już zespoły napędowe z kołami, ale nie mam jak zamieścić, bo dodawanie załączników nie działa Może jednak zaczekasz z krytyką, aż cokolwiek pokażę?
System kroczący, jest zdecydowanie zbyt wolny (a raczej zdecydowanie wolniejszy niż kołowy, przy takim samym wydatku energetycznym). Jest też bardziej wymagający jeśli chodzi o sterowanie, czyli pobiera też więcej mocy obliczeniowej.
Napisz dokładnie założenia odnośnie sterowania to ci pomogę. Przynajmniej od strony komunikacyjnej. Chodzi o to jakie silniki, do czego służą (lewo,prawo itp.), jakie są stopnie mocy do ich sterowania, i jakimi sygnałami będą sterowane całe takie moduły. A postaram się opracować przynajmnej projekt modułu komunikacyjnego (media do wyboru: kabel, IR, RF) współpracujący z komputerem. Zrobię jakąś aplikację sterującą co by się jakoś prezentowała. Być może wykonam również cały układ elektroniczny (kwestia czasu i zasobów mamony).
Może zrobicie sterowanie za pomocą telefonu komórkowego z javą i bluetooth'em? Wtedy robotem mogłoby sterować kilka osób jednocześnie: kierowca, operator ramienia, kamerzysta itd. Jak prawdziwa załoga
Zakładałem jednoczesne zastosowanie wielu mediów (kabel RS232, Irda, radio - klasyczna kodowana transmisja szeregowa ). Ale tylko jedno z nich może sterować. Myślałem juz nad użyciem modemu BT lub ZigBee ale bez pracy w sieci. Implementacja sieci to 2x tyle pracy. Chyba żeby zrobić każdy element niezależnie sterowany i w całości to złączyć w jeden kawałek - wtedy na żadanie można każde urządzenie odłączyć od 'main streamu' i przypisać do innego urządzenia sterującego. Prolem to zgranie ruchów różnych elementów, bo każdy operator może wydawać 'ruch' który nie musi współgrac z resztą. Np. opuszczenie ramienia poniżej ziemii przez jednego operatora i ruch do przodu przez drugiego powoduje konflikt, podonie zanik jednego sygnału sterującego. Bluetooth jak najbardziej jednak ze względów bezpieczeństwa i prostoty wykonania bez pracy w sieci. Pozatym nie bardzo mam rozeznanie w modułach BT i programowaniu javy na telefonach. Pozostanie możliwość dodania modułu BT w przyszłości.
Jak tam rozwiązywanie problemów z załącznikami? A Wy możecie dodawać załączniki?
Tymczasem wrzuciłem screena na swoją stronkę:

Te niebieskie, to wkrętarki tego typu:

Więc możecie sobie wyobrazić jakiej wielkości będzie łazik
Sterowanie odbywa się tak jak w poprzednich pojazdach, czyli cała prawa strona lub cała lewa w przód albo w tył, lub w przeciwnych kierunkach. Można połączyć trzy silniki jednej strony równolegle i zasilać z trzech akumulatorów podłączonych także równolegle, co ma tą zaletę, że wystarczyłby jeden sterownik mocy. Można też podłączyć dwa akumulatory zamiast trzech, oszczędzając na masie. Jednak lepiej jest każdy silnik podłączyć do "swojego" akumulatora, w razie awarii któregoś z nich, pozostałe dwa wciąż działają. Tyle, że potrzeba trzech układów sterowania mocą na jedną stronę, czyli w sumie sześć. I tu jest zadanie dla Ciebie, fyszo. Opracowałbyś takie sterowanie?
3 silniki pracujące równolegle i do tego zasilane równolegle?. Zawsze jeden silnik będzie pracował najwolniej i będzie obciążeniem dla pozostałych dwóch. Tak samo najszybszy silnik będzie najbardziej obciążony. Samo sterowanie mocą to nie problem, tylko trzeba zrobić regulator obrotów żeby wyrównać obroty tych silników. Przekładnie lub oś silników są odsłonięte? Czy jest możliwość założenia magnesiku lub czujnika na oś silnika? Zastosuje się kontaktrony żeby zliczać obroty silników i przez to wprowadzi się sprzężenie zwrotne i wyrównanie obrotów. Ma to na celu rzeczywiste sterowanie obrotami. W przypadku sterowania mocą takiej możliwości nie ma.
W tej wersji pojazdu, aż tak dokładne sterowanie obrotami nie wydaje mi się konieczne. Różnice nie powinny być duże, a przy skręcaniu i tak każde koło będzie miało inny poślizg, więc różnice w stosunku pokonanej odległości do ilości obrotów i tak wystąpią. Przy pokonywaniu przeszkód te różnice będą jeszcze większe, gdy np. prawa strona wjedzie i zjedzie z kamienia, a lewa pojedzie po prostej. Wtedy taki system musiałby współpracować z układem orientacji i tak sterować obrotami, żeby pomimo różnych dróg do pokonania przez każde koło, kierunek jazdy całego łazika pozostał nie zmieniony. Ale to pieśń przyszłości. W tej chwili chodzi o to, żeby sterowanie było jak najprostsze, bo możliwości wykonawcze mamy bardzo ograniczone.
Najtaniej i najszybciej będzie dać 6 tranzystorów MOSFET działających jako klucze załaczające zasilanie impulsami. Te tranzystory wysterować przebiegiem prostokątnym 12V o regulowanej szerokości impulsów. Zakładamy że czas trwania okresu takiego sygnału to 10ms (100hz). I dajemy 'on' - czyli stan wysoki o czasie trwania od 1ms do 8ms na obie linie silników. Regulujemy wtedy moc dostarczaną do silników (od 10% do 80%) i odpowiada to wciskaniu gazu. Kolejne 2 moduły (bramki z odpowiednim układem RC) powodują wydłużanie tych impulsów w granicach 1-15% ale przeciwstawnie do siebie. Czyli jak jeden układ wydłuży impuls o 5% to na drugim skróci o 5%. W ten sposób otrzymujemy możliwość skręcania dzięki różnicy dostarczanych mocy.
Drugi sposób to jak w czołgach - 2 drążki gazu - lewy i prawy. Czyli 2 generatory przebiegu protokątnego o regulowanym wypełnieniu impulsu w zakresie 10-90%. Skreca się przez ujmowanie mocy na jedną stronę.
Nie ujmowanie mocy na jedną stronę, tylko zmianę polaryzacji przy zachowaniu takiego samego poziomu mocy. Popatrz, jak rozwiązałem układ sterowania w wersji 2.0:

To on sie będzie zatrzymywał żeby skręcic? No jak sobie życzysz. Takie coś robi się na mostkach H. Czyli 6x4Mosfety dla każdego z osobna stopnia mocy, lub 2x4Mosfety dla wspólnego sterowania trójkami silników. Ewentualnie tranzystory bipolarne. Oczywiście trzeba zmodyfikować sterowanie. Wieczorem sklecę jakiś schemat wstępny i rozejrzę się za optymalnym rozwiązaniem.
Niekoniecznie musi się zatrzymać. Lewa strona może cały czas pracować, a prawą można spowolnić, powodując zakręt po lekko zakrzywionym łuku, lub lekko cofać powodując zakręt po mocniej zakrzywionym łuku, lub cofać z taką samą prędkością jak lewą stronę, co spowoduje obrót w miejscu. W tym cała korzyść, że lewa i prawa strona są od siebie całkowicie niezależne.
Polecam książki o Javie na urządzenia przenośne. http://helion.pl/search.c...g=1&szukaj=J2ME
W dwóch ostatnich jest sporo o bluetooth'u. RS i irda to technologie schodzące. Nowe wymagają pracy na naukę, ale też dają większe możliwości.
Marcusos, nie mogę załadować fotek, dostaję następujący komunikat:
Błąd wysyłania załącznika (nie można skopiować do określonego katalogu: ./files/wiert3_205.jpg, skontaktuj się z administratorem forum.
Powinno juz dzialac... sorki za utrudnienia...
OK, dzięki!
Poniżej obiecane fotki w klimacie noir
Jakiej mocy są te silniki? Zasilanie 4,8V? Są gotowe mostki H (np. L298) do sterowania silników. Maksymalny prąd to 3A na stopień. W układzie są 2 stopnie mogące pracować równolegle czyli prąd 6A. Tylko z tego co pamiętam to jeden silnik z wkrętarki tyle pobiera a my mamy 3x tyle. Jeśli byłaby taka możliwość to sprawdź ich prąd zwarciowy. Zablokuj silnik i zmierz pobór prądu. Z drugiej strony można założyć tylko 30% obciążenie bo duża przekładnia, czyli prąd pobierany przez 3 silniki można przyjąc za maksimum jednego.
układ mostka l298:
www.allelectronics.com/spec/L298N.pdf
trochę informacji o mostkach H:
http://www.google.pl/sear...&q=h-bridge&lr=
W tego rodzaju wkrętarkach są akumulatory 12-18 V. Niestety nie mam możliwości zmierzenia prądu
Ale prace nad konstrukcją podwozia się posuwają:
[ Dodano: 11-11-2007, 16:45 ]
Napisz jeszcze wymiary regulatora obrotów, żebyś mógł go dopasować gdzieś w podwoziu. Będzie to rodzaj pudełka (oceniam wymiary na 50x20x10mm) z aluminium. Tylko się zastanawiam czy dać cyfrowe sterowanie I2C (na pewno się przyda w przyszłości) czy klasyczny mostek H? Być może poświecę trochę więcej czasu żeby to juz było wszystko w jednym jako gotowy wielofunkcyjny moduł. Ktoś kto będzie dorabiał inne moduły będzie miał wielokrotnie łatwiej z dopasowaniem a i ty to szybciej złożysz. Ułatwi to budowę centralnego systemu sterującego. Kombinowałem jakiś czas z przerobieniem regulatora do modeli RC ale nie wyszło (mają własne procesorki). Na jakich złączach będzie doprowadzone zasilanie do silników? Czy mam się kierować swoim wyczuciem? Proponuję zrealizować elektroniczną specyfikację modułów. Co i jak ma działać żeby nie wymyślać w trakcie.
W czwartek (czyli jutro) jadę do Warszawy spotkać się z Kołem Robotyków i Kołem Astronautycznym na PW. Tam ustalimy ogólne założenia i być może już parę szczegółów technicznych. Przypuszczam, że znajdzie się tam w zespole ktoś odpowiedzialny za elektronikę (właściwie to konieczność ) i nie wiem jak ten ktoś będzie planował sterowanie. To będzie jakiś student, więc może mieć niezbyt praktyczne pomysły...
Będę budował też mniejszego robota u siebie w domu i nie wiem jak rozwiązać mu sterowanie, bo z elektroniki jestem dosyć zielony . Zaprojektujesz do niego wyposażenie? Kupuję już w internecie sześć wkrętarek. Szczegóły wkrótce. Jeśli Twoje sterowanie będzie miało większe możliwości niż te wymyślone przez studentów na PW, to przekonam ich, żeby zastosowali Twoje
No wiesz, PW na pewno ma większe możliwości. Tym bardziej że wszystko co z elektroniką związane zostawiłem w rodzinnym domu 2 lata temu i pewnie już dawno na śmieciach jest. Ja bym rozdzielił moduł regulatora mocy od głównego sterowania. W ten sposób mamy metalowy moduł regulatora przykrecany gdzieś do podwozia który jest sterowany cyfrowo (można odpiąć kabelek i sterować z czego się chce np. PC) bez wnikania w sposób działania. Można z głównego sterownika zrobić przekierowanie na inny sposób sterowania i przez innego użytkownika i jednocześnie kierować w kilka osób całością, takie moduły są bardzo elestyczne w sterowaniu. Są mniej ekonomiczne i bardziej rozbudowane ale lepiej poddają się modyfikacjom (np. przerabiamy moduł regulatora na lepszy ale reszta pozostaje bez zmian).
Jeśli chodzi o projektowanie założeń elektronicznych to niech nie ponosi tych studentów fantazja, bo będą chcieli realizować algorytmy SI itd. Wytłumacz że to ma być na początek sterowany pojazd. Bez inteligencji. Ja to widzę tak:
Schemat wygląda OK, jest bardzo elastyczny. Jeśli dobrze widze, to w każdej chwili będzie można się przełączyć na sterowanie "ręczne" tylko poprzez moduł komunikacji, w całkowitej niezależności od komputera pokładowego?
W przypadku awarii wysyłamy komendę 'reset' do sterownika głównego. Jesli to nie pomaga to przełączamy się na sterowanie ręczne, wtedy jedyna elektronika która działa to moduł komunikacji i regulator(reszta urządzeń wyłaczona) , zakładam również całkowite wyłaczenie zasilania 'na żadanie' przez moduł komunikacyjny. W przypadku braku komunikacji pojazd staje lub ustawia się w pozycji ochronnej/neutralneji przerywa wszystkie czynności i czeka. Wykrycie zawieszenia centralnego sterownika (watchdog timer) i braku komunikacji wyłącza się całkowicie zasilanie. Można się pokusić o wysięgnik z anteną, ale tu juz to traci sens bo zawsze będzie granica zasięgu radiowego a w nieskończoność anteny nie podniesiemy.
Ticonderoga potrzebował bym dokladny projekt kół. Mam koło siebie fabrykę aluminiowych felg może uda mni się ich namówic na zrobienie dla nas sześciu kółek z aluminium.
Pokaż im te graficzki. Średnica będzie wynosiła około 22-26 cm. Dokładnego projektu jeszcze nie ma, bo nie wiemy jakiego rodzaju będą wkrętarki i jak te koła osadzić.
Czolem. Wpisalem sie ostatnio na liste do tego projektu (podczas zebrania SKA na prezentacji misji promu Discovery), ale nie wiem nic poza tym. Sa jakies ustalone terminy spotkań? kiedy i gdzie najbliżej bedzie mozna pogadac o planach i jaki jest adres grup dyskusyjnych do AMPB 2.1 i SSATI?
thx i pozdr
Witamy!
Najbliższe spotkanie odbędzie się za 1-2 tyg. w ITC, wkrótce pojawią się na PW plakaty informacyjne.
A najbliżej można pogadać właśnie tutaj, od tego jest ten wątek
Fyszo, chyba nastąpi zmiana planów mojego robota. Otwarto w Białymstoku nową galerię handlową i przecenili wkrętarki 12V na 40 zł! Czuję, że kupię . W takim wypadku trzeba będzie jednak zrobić sterownik do każdego koła. Wkrętarka ma też regulację prędkości, może uda się wykorzystać jej układy. Kupię, rozkręcę i dam znać
Napisz jak poszło w Warszawie
Najbardziej mnie cieszy pozytywne przyjęcie projektu przez zarząd SKA i potraktowanie go serio. Koordynatorem projektu został Bartek i zaangażował się w niego naprawdę poważnie. Na następnym spotkaniu mamy nadzieję zebrać ludzi z innym wydziałów, żeby stworzyć wokół nich grupy zajmujące się konkretnymi podzespołami i już rozpisać zadania.
Projekt nabiera rumieńców i mamy duże szanse wyrobić się na czas, czyli w styczniu wysłać do centrali TMS zgłoszenie. Panie i panowie, otwiera się nowa karta w dziejach MSP!
Ej a może google moon będzie w zasięgu
Sukces za oceanem może sprawić, że się właśnie w tym zasięgu znajdziemy
10 milionów dolarów można zarobić za projekt wykorzystujący system 'Google'a' - android. Przeznaczony do rozwiązań mobilnych. Głownie chodzi im raczej o nawigację opartą o ich rozwiązania ale podobno system jest szerokoukierunkowany.
Wracając do łazika to jak to teraz ma być? Ticonderoga budujesz własny łazik? Niezależnie od projektu?
Tak, ponieważ będzie "nasz", czyli MSP.
Budowę tego drugiego finansuje PW (mam nadzieję ) i to PW będzie właścicielem. Mogą nie być zbyt skorzy do wyporzyczania go nam na akcje promocyjne. Chociaż nie wiem, może tam też pracują ludzie
Właściwie to przydałby się drugi wątek, dotyczący robota z PW. Pojawi się w odpowiednim czasie, lub wreszcie przyda się ten:
http://forum.marssociety.pl/viewtopic.php?t=274
Postanowiłem nie wyważać otwartych drzwi i szukając materiałów o robotach kroczących znalazłem tą stronkę (właściwie sklep).
http://www.lynxmotion.com...s&CategoryID=17
Szkoda że mechanika wykonana na serwach. Odpowiedni system cięgieł stworzyłby kilka razy lżejszą konstrukcję.
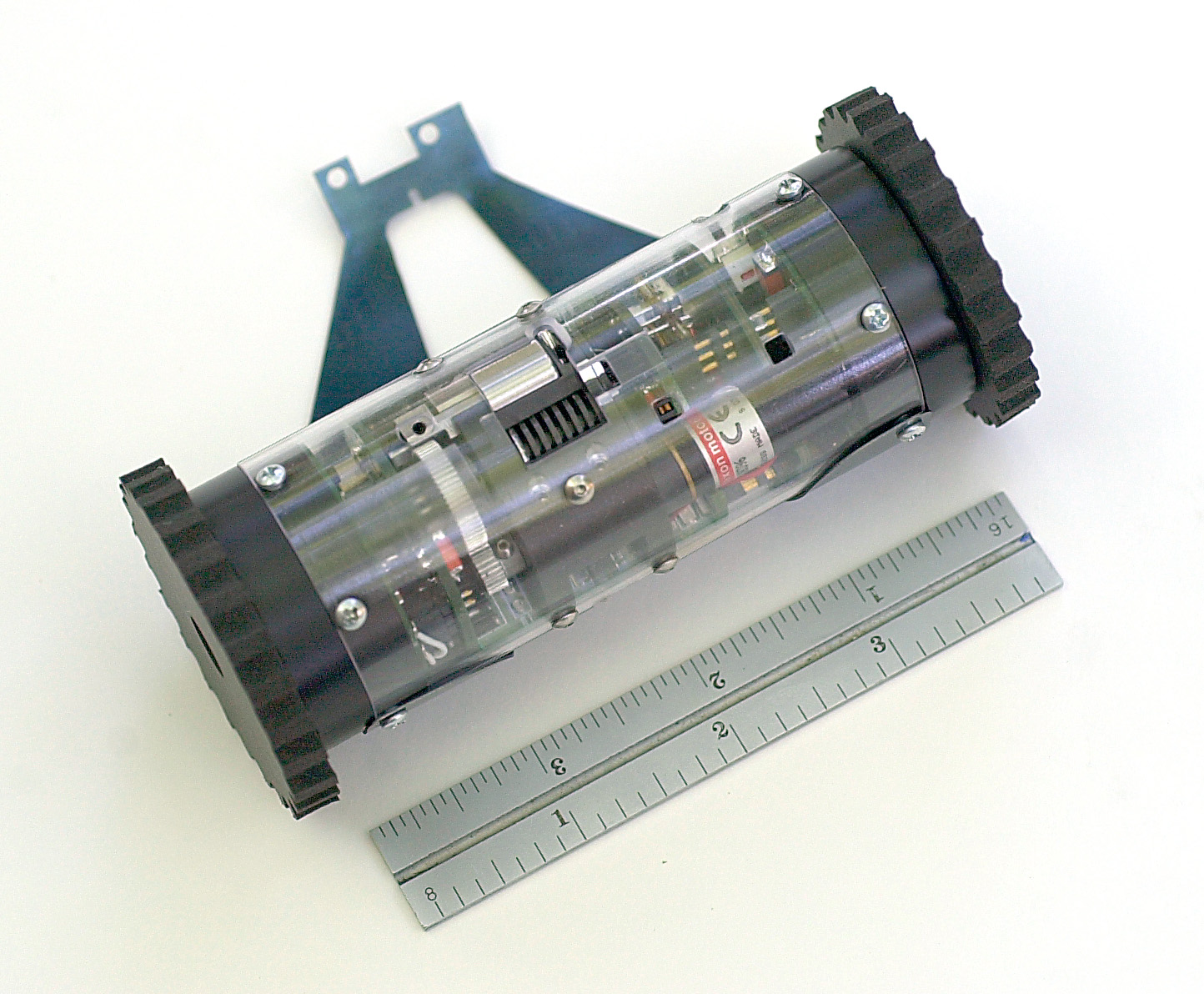
Sekcja wkrętarek wykazała, że napędzane są silnikami HRS-550S, szczegóły na stronie producenta:
http://www.hongyangmotor....?id=143&class=7
Regulator oparty jest na tranzystorze, którego fotkę widać poniżej
W środku "czarnej skrzynki" dojrzałem też potencjometr.
Do czasu zdobycia miernika uniwersalnego, nie mogę podać więcej szczegółów.
Fyszo, czy na podstawie tych informacji możesz zaprojektować regulatory dla wszystkich sześciu wkrętarek, pracujących w układzie 2x3, i sterowanych za pomocą aparatury RC? Chodzi o to, żeby jak najszybciej podać listę elementów dla sponsora, żeby się nie rozmyślił
Masz sponsora na całość?
[ Dodano: 11-12-2007, 10:29 ]
Właśnie się kapnąłem, że nie poinformowałem Was, o zakupie sześciu wkrętareczek po ekstrapromocyjnej cenie
Z dalszych dobrych wieści:
1. Przede wszystkim, na razie rezygnuję z budowy dwóch łazików, jednego warszawskiego, drugiego białostockiego - MSP-owskiego. Postanowiłem połączyć siły i zwiększyć szanse na udział w tegorocznej edycji URC. Lepiej mieć jeden dobrze zrobiony do końca, niż dwa w połowie. Albo: lepiej mieć jedną pieczeń na jednym ogniu dobrze przysmażoną, niż dwie na wpół surowe, itp.
2. Trwają rozmowy ze sponsorem elektroniki do łazika. Na razie nie ma co ujawniać szczegółów, ale jak będzie wiadomo coś konkretnego, oczywiście damy znać.
3. Sterowanie napędem projektuje fyszo i już wiadomo, że to będzie mocny punkt zespołu. Nawet ja nie nadążam
4. Studenci z PW też biorą się do roboty. Bartek wyszukuje kolejnych ludzi, a ja namawiam ich do zarejestrowania się na forum i konsultowania z nami ich poczynań, ale chyba się wstydzą... Nie ma to tamto, wkrótce się pojawią!
5. Jest już koncepcja manipulatora, będzie ją rozwijał Marcin.
6. Nie mamy jeszcze sponsora na całość, a zasilanie z baterii słoneczych będzie zbyt drogie i niepraktyczne
[ Dodano: 13-12-2007, 16:49 ]
Witam
Uwagi co do pustynnej wersji łazika:
1. Wysoka temperatura pracy, wymusza stosowanie lustrzanych okryć łazika. Uważam to za konieczność bo silniki będą generować własne ciepło które trzeba również odprowadzać. Warto rozejrzeć się za panelami słonecznymi. Nie tyle do zasilania łazika co ochrony przed słońcem (parasol) przy okazji może zasilać jakiś moduł chłodzący (peltiera).
2. Konstrukcja mechaniczna jest słabo przystosowana do dużych/niskich temperatur. Przy +60 i -60 niesposób wychłodzić lub ogrzać silników i reszty. Konstrukcja wogóle nie wykorzystuje zrównoważenia cieplnego między modułami. A przeznaczenie marsjańskie musi przewidywać pracę do -90*C gdzie niemożliwa jest praca jakiejkolwiek elektroniki i akumulatorów. Dlatego spora część ciepła z silników i układów mocy jest tracona a inne elementy muszą być podgrzewane niezależnie (szczególnie akumulator i sterownik).
3. Konstrukcja mechaniczna jest słabo przystosowana do pustynnych warunków, za dużo elementów mechanicznych i wszelkich dźwigni/przełożeń. Byle ziarenko piasku zablokuje cały system. Silniki posiadają otwory przy szczotkach przez które może dostać się piasek podczas burzy piaskowej.
4. Koła trzeba maksymalnie przystosować do jazdy po sypkim gruncie, odporne na temperaturę.
Trochę to krytyczne uwagi ale nie ma co owijać w bawełnę.
Pozdrawiam Krzysztof
Po bliższych analizach coraz bardziej staje się jasne, że podwozie trzeba zasadniczo przekonstruować. Chociażby dlatego, że pojawiają się obawy o dyskwalifikację z zawodów, ponieważ podwozie rocker-bogie zostało przez NASA opatentowane i mogą pojawiać się pod tym względem zarzuty.
Zresztą rocker-bogie przeznaczone jest do powolnego poruszania się, wręcz pełzania i w warunkach dużych obciążeń dynamicznych się nie sprawdzi. A jedną z konkurencji na zawodach będzie dostarczenie ładunku w jak najkrótszym czasie. Do końca grudnia będą trwały mocne konsultacje, może nawet ostatecznie stanie na podwoziu czterokołowym.
Co do ochrony przeciw zapiaszczeniom i zapyleniom - dlatego użyłem części rowerowych, bo są przecież przeznaczone do pracy w ekstremalnych warunkach (sam jeżdżę po bezdrożach jak wariat ). A te otwory we wkrętarkach planowałem zakryć pokrowcami z tkanin, takimi "czepkami na gumkach" na całą tylną część wkrętarki.
Wkrętarki lepszej jakości przydałyby się właśnie po to, żeby mogły napędzać większe koła - szersze, z rozbudowanym bieżnikiem, bardziej terenowe.
A co powiecie na 6-kołowiec ala transporter wojskowy? Koła od taczek (wersja pompowana, bo są też tylko z gumy). Rama prosta jak konstrukcja cepa (prostopadłościan). Łatwy montaż na takim obiekcie różnych chwytaków, wewnątrz również. Wymiary korpusu szacowałbym na 1000x400x300mm. Kontrukcja mało efektowa ale skuteczność może być powajająca, jako łazik ogólnego zastosowania (przynieś, podaj, pozamiataj). Z przodu jeden akumulator, drugi z tyłu. Po bokach jeśli by się dało wyłożone wąskie akumulatory (zabezpieczenie radiacyjne - przy okazji zasila). Czyli korpus wykonany jako koryto obłożone ołowiem (akumulatory). Całość obita materiałem termicznym i oklejona folią aluminiową. Wewnątrz moduły ogólnie: 1. Sterownik główny, 2. Moduł łaczności, 3. Moduł zarządzania zasilaniem, 4. Moduł zarządzania ciepłem. Wszystkie elementy grzejące się i chłodzące połaczone wspólną rama aluminiową wewnatrz łazika a ciałość bilansu termicznego jest nadzorowana przez moduł cieplny. Wierzch łazika to 2 klapy - jedna przykręcana na uszczelkę do korpusu i na niej jest możliwość montażu wysięgników i innych urządzeń. Tylna klapa jest uchylna (również przykręcana) z możliwością montażu urządzeń ale głównum przeznaczeniem jej jest konserwacja czyli wszytko co najbardziej zawodne powinno się znależć pod tylną klapą. Wierzch oczywiście izolowany termicznie (wystają 2x4 śruby z klap do montażu wysięgników) oraz wykonany z grubej blachy stalowej lub podobnych materiałów. Całość przy podanych wymiarach ważyć będzie do 100kg. Oczywiście projekt można skalować do mniejszych rozmiarów (wersje miniaturowe-autonomiczne) lub większych (opcja przewożenia ludzi). Co o tym myślicie? Wszystkie doświadczenia nabyte przy kunkursie URC będzie można wykorzystać przy budowie nastepnego łazika (może na ten konkurs księżycowy?) a w przyszłości któraś wersja łazika będzie jeździć po Marsie. Bo nie ma co się łudzić że od razu za pierwszym razem zbuduje gotowy marsjański łazik. Do tego potrzeba doświadczenia jakie mają agencje kosmiczne i wytwórnie typu General Motors, Lockheed-Martin.
Wszystko fajnie, ale taka konstrukcja sprawidzi się raczej w dużej skali. Jeśli będzie mała, zwykły najazd na kamień spowoduje, że cała zacznie się chybotać a część kół straci kontakt z podłożem. Dlatego pojazd małych rozmiarów musi mieć bardzo elastyczne podwozie, zdolne do dużych wychyleń. Twój opis sprawdzi się w dużym pojeździe i zwróć uwagę, jak bardzo przypomina załogowy MPV!
Witam
Uwagi co do pustynnej wersji łazika:
1. Wysoka temperatura pracy, wymusza stosowanie lustrzanych okryć łazika. Uważam to za konieczność bo silniki będą generować własne ciepło które trzeba również odprowadzać. Warto rozejrzeć się za panelami słonecznymi. Nie tyle do zasilania łazika co ochrony przed słońcem (parasol) przy okazji może zasilać jakiś moduł chłodzący (peltiera).
2. Konstrukcja mechaniczna jest słabo przystosowana do dużych/niskich temperatur. Przy +60 i -60 niesposób wychłodzić lub ogrzać silników i reszty. Konstrukcja wogóle nie wykorzystuje zrównoważenia cieplnego między modułami. A przeznaczenie marsjańskie musi przewidywać pracę do -90*C gdzie niemożliwa jest praca jakiejkolwiek elektroniki i akumulatorów. Dlatego spora część ciepła z silników i układów mocy jest tracona a inne elementy muszą być podgrzewane niezależnie (szczególnie akumulator i sterownik).
Zastanawiam się, czy nie warto pokusić się o zaprojektowanie systemu opartego na vortex tube :-) (np. http://en.wikipedia.org/wiki/Vortex_tube), o odpowiednio małych rozmiarach. Dodatkowo potrzebna byłaby sprężarka i firma, która chciałaby podjąć się wykonania precyzjnych elementów. Nie wiem, czy to wydajne rozwiązanie, ale sama vortex tube to ciekawy i prosty pomysł, który można stosować w space -> jeśli znajdzie się ktoś, kto by się tego podjął, byłby to krok w dobrą stronę nie tylko w kwestii łazika, ale polskiego przemysłu kosmicznego w ogóle. Można się starać o dofinansowanie czegoś takiego z ESA/PECS.
Np. rura wirowa z polską dobawką: możliwością dodatkowej produkcji elektryczności: http://www.uprp.pl/wydawn.../bup24_2004.pdf
Rura wirowa kojarzy mi się z wymyślonym w 19 wieku Retorem czyli obracającą się rurą która potrfi zastąpić żagiel na statkach. A tak apropo czy dzialalo by to w kosmosie?
[ Dodano: 19-12-2007, 21:48 ]
4x80w. Przy maksymalnym obciążeniu. Tyle pobierają silniki. Reszta nie więcej jak 20W. Przy średniej mocy 150W, 1m2 paneli powinien wystarczyć do całkowitego zaspokojenia łazika w energię. Przy buforowaniu energii za pomocą akumulatorów chwilowe większe pobory będą zapewnione. Powierzchnia paneli może być dowolna (0-1m2) bo zawsze posłuży do uzupełnienia akumulatorów.
Rotor wytwarza siłę nośną na zasadzie różnicy ciśnień z różnych stron obracającego się walca, gdy opływa go powietrze. Nie zadziała, gdy nie ma wiatru, a tym bardziej, gdy nie ma atmosfery. Wprawdzie na Marsie jest jedno i drugie, ale bardzo rozrzedzona atmosfera raczej nie sprzyja dużym siłom nośnym. Gdyby Mars był pokryty oceanami, to co innego
Jako ciekawostkę dodam, że najciekawsze współczesne zastosowanie napędu rotorowego to jacht kapitana Cousteau "Alcyone":
http://www.cousteau.org/f...lle_du_vent.pdf
I niestety nie zrealizowany projekt jachtu "Calypso". Tu jest fajna galeria:
http://www.histarmar.com....nerCousteau.htm
Pamiętacie w tv programy edukacyjne Cousteau? Oglądało się z wypiekami na twarzy, jak z innego świata!
[ Dodano: 21-12-2007, 11:39 ]
Żeby rozwiać wszelkie wątpliwości:
Prace nad AMPB 2.1 zostały na razie zawieszone. W tej chwili budujemy na zawody URC 2008 wersję 3.0. Wersja 2.1 nie nadaje się, ponieważ podwozie rocker-bogie przeznaczone jest do pojazdów poruszających się z prędkościami do kilku km/h, a na zawody potrzebujemy czegoś szybszego.
Czy jest gdzieś na forum oddzielny wątek na temat łazika budowanego na zawody URC?
W zasadzie jest
http://forum.marssociety.pl/viewtopic.php?t=274
Ale nie publikujemy na razie niczego w obawie, że konkurencja może nas podglądać
Jakby spróbować poszukać w sieci info o robotach konkurentów, to też ani bajtu nie uświadczysz. Ale wkrótce puścimy pierwszą parę z gęby, bo musimy zabiegać o rozgłos w mediach tak ważny dla sponsorów.
Z najnowszych wieści: w zeszły weekend odbyły się już jazdy próbne i podobno pędzi jak szatan Dostaliśmy też dofinansowanie z PW, a w najbliższym czasie planowane są prezentacje w SKA i CBK, więc śpieszymy się z dopinaniem projektu.
A tu jest ciekawy przykład robota:
http://www.robot.bighost.pl/
Jak się dowiedziałem w programie Pikniku Naukowego na rynku Starego Miasta w Warszawie jest prezentacja prototypu łazika marsjańskiego zorganizowana przez Studenckie Koło Astronautyczne Politechniki Warszawskiej. Jak się domyślam chodzi tutaj oczywiście o Skarabeusza. Może jakieś fotki do nas dotrą?
Niestety nie mogłem być na tym pikniku (sesja), o zdjęciach także nic nie wiem. Mateusz z SKA napisał, że było duże zainteresowanie
CZY KTOŚ WIE CO Z FESTIWALEM 2008
Na Onecie znalazłem ciekawy artykuł pt. Polskie roboty na Księżycu? Może on zainteresuje ludzi związanych z projektem Skarabeusza.
http://wiadomosci.onet.pl...ezycu,item.html
Na stronie Astrobiology Magazine ukazał się artykuł o nowym łaziku zbudowanym przez centrum JPL NASA służącym do badań geologicznych. W przeciwieństwie do dotychczasowych łazików, które poruszały się raczej po płaskim terenie, ten będzie mógł przeprowadzać badania na stromych stokach o nachyleniu do 85 stopni. Cliffbot, tak nazwano tego robota, jeśli dobrze zrozumiałem, składa się on z dwóch jednostek połączonych liną. Jedna pozostaje na szczycie klifu i asekuruje drugą opuszczającą się na linie, tak jak w przypadku alpinistów.

Więcej na stronie:
http://astrobio.net/news/...order=0&thold=0
W serwisie Mars Today
http://www.marstoday.com/....html?pid=27501
oraz w Mars24info po polsku
http://www.mars24.info/?key=2,,141
ukazały się informacje o konstruowanym wspólnie z NASA miniaturowym pojeździe, który w przyszłości może posłużyć do eksploracji miejsc niedostępnych dla obecnych łazików. Są dostępne filmiki z prezentacji robota. Jest również link do strony JPL z krótkim opisem pojazdu i jego zastosowań
http://www-robotics.jpl.n...m.cfm?System=16
oraz strona poświęcona tego typu robotom zwanym Scout
http://distrob.cs.umn.edu/scout.php
Propozycje NASA

mini Scout
Jak zwykle o postępach w projektach MSP dowiadujemy się z mediów a nie ze strony lub z naszego forum. Dzisiaj ukazał się artykuł na stronie serwisu Mars24.info, który donosi o tym, że „Przemysłowy Instytut Automatyki i Pomiarów podjął współpracę z Mars Society Polska i Studenckim Kołem Astronautycznym w zakresie konstrukcji robota marsjańskiego – Skarabeusz”.
http://mars24.info/?key=2,,166
Hej. Te komunikaty wysyła do mediów Łukasz Wilczyński - może się z nim skontaktuj, żeby Ci przesyłał kopię z pierwszej ręki do wrzucania ich na forum.
Pozdr.
m
I najważniejsze - żeby pojawiały się na naszej www! Trochę lipa, że nic tam nie ma o Skarabeuszu.
Zwłaszcza miniskout ma swój urok: bo wciśnie się nawet tam, gdzie nie wlezie żaden człowiek .
"Koła" wyglądają na genialnie praktyczne. Tylko przydałby się jeszcze scoutowi jakiś odwiertnik do pobierania i prechowywania (analizować może przecież urządzenie główne) próbek gleby, na litość.